- Anasayfa
- Ben Kimim?
- Öğrenci İşleri
- Dersler
- İletişim
|
||||||
 Arduino Bluetooth Kontrollü Araba Yapımı
Arduino Bluetooth Kontrollü Araba Yapımı 14.05.2018 (43053) kez okundu 

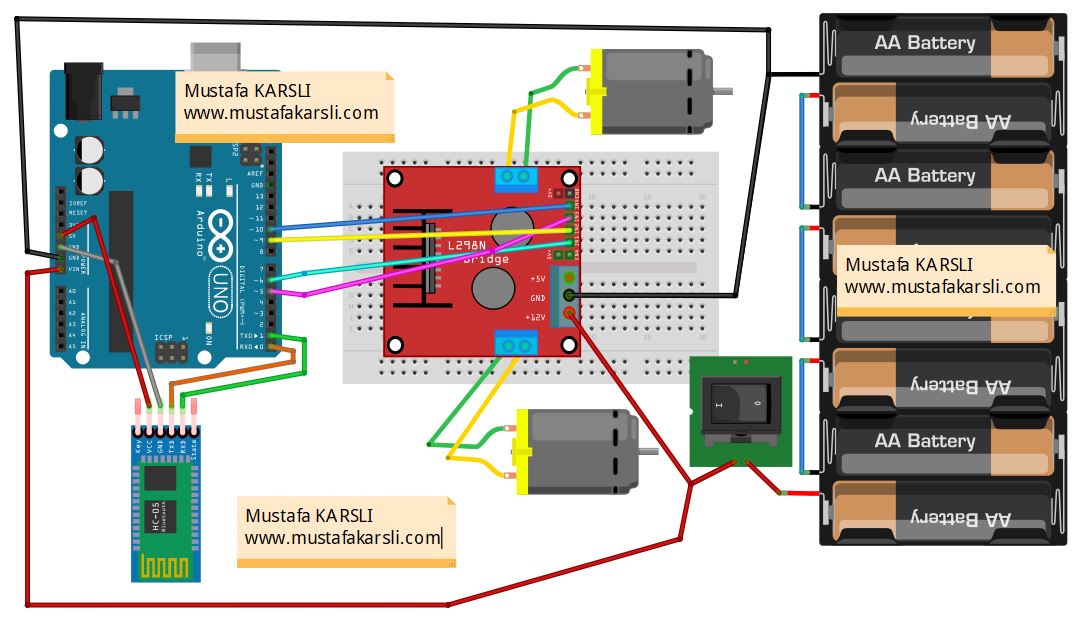
 Arduino ile bluetooth kontrollü araba yapımından bahsedeceğim. Aşağıda arabanın devresi ve kodları mevcuttur. Hazır 2 tekerli araba kiti alıp bunun üzerinden bluetooth kontrollü arabayı tamamladım. Burada yaptığımız arabada temel işlevler yapılmaktadır. İleri, geri, sol, sağ ve hız ayarı gibi... Diğer işlevleri kendiniz koda ekleyerek kullanabilirsiniz. Burada cep telefonu ya da tablet üzerinden kontrol edebilmek için play storedan "Arduino Bluetooth Araba Kontrol" uygulamasını kullanabilirsiniz. Malzemeler:
const int motorA1 = 5; // L298N'in IN3 Girişi
const int motorA2 = 6; // L298N'in IN1 Girişi
const int motorB1 = 9; // L298N'in IN2 Girişi
const int motorB2 = 10; // L298N'in IN4 Girişi
int durum;
int Hiz=255;
void setup() {
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
Serial.begin(9600);
}
void loop() {
if(Serial.available() > 0){
durum = Serial.read();
}
// Uygulamadan ayarlanabilen 3 hız seviyesi.(Değerler 0-255 arası)
if (durum == '1'){
Hiz=50;}
else if (durum == '2'){
Hiz=150;}
else if (durum == '3'){
Hiz=255;}
/******************** İleri *************************/
if (durum == 'y') {
analogWrite(motorA1, Hiz); analogWrite(motorA2, 0);
analogWrite(motorB1, Hiz); analogWrite(motorB2, 0);
}
/****************** İleri Sağ *********************/
else if (durum == 'k') {
analogWrite(motorA1,Hiz ); analogWrite(motorA2, 0);
analogWrite(motorB1, 100); analogWrite(motorB2, 0);
}
/****************** İleri Sol ********************/
else if (durum == 'm') {
analogWrite(motorA1, 100); analogWrite(motorA2, 0);
analogWrite(motorB1, Hiz); analogWrite(motorB2, 0);
}
/****************** Geri ****************************/
else if (durum == 'a') {
analogWrite(motorA1, 0); analogWrite(motorA2, Hiz);
analogWrite(motorB1, 0); analogWrite(motorB2, Hiz);
}
/******************* Geri Sağ **********************/
else if (durum == 'f') {
analogWrite(motorA1, 0); analogWrite(motorA2, 100);
analogWrite(motorB1, 0); analogWrite(motorB2, Hiz);
}
/******************* Geri Sol *********************/
else if (durum == 'z') {
analogWrite(motorA1, 0); analogWrite(motorA2, Hiz);
analogWrite(motorB1, 0); analogWrite(motorB2, 100);
}
/********************** Sağ *************************/
else if (durum == 's') {
analogWrite(motorA1, Hiz); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/*********************** Sol *************************/
else if (durum == 'l') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, Hiz); analogWrite(motorB2, 0);
}
/********************* Dur ************************/
else if (durum == 'd'){
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
}
|
| © 2008 - 2024 Mustafa KARSLI |